
在前一篇《OpenNI 2 簡介》裡,Heresy 大概解釋了 OpenNI 2.0 的基本功能以及他的架構。而接下來的這一篇,就是要來講怎麼寫 OpenNI 2 的程式了~如果是要了解 OpenNI 1.x 版的程式開發的話,請參考《OpenNI 1.x 教學文章》這系列的文章。
首先,在安裝好 OpenNI 2.0 的 SDK 後,在安裝目錄(預設是 C:\Program Files\OpenNI2\)裡面,會有下列的資料夾:
|
目錄
|
用途
|
32 位元
|
64 位元
|
|---|---|---|---|
| Documentation | OpenNI SDK 開發程式的參考文件 | ||
| Driver | 官方支援硬體的驅動程式 | ||
| Include | 程式開發時必須的 header 檔 | $(OPENNI2_INCLUDE) | $(OPENNI2_INCLUDE64) |
| Lib | 程式開發時必須的 lib 檔 | $(OPENNI2_LIB) | $(OPENNI2_LIB64) |
| Redist | 程式執行時必須的 runtime library(dll) | $(OPENNI2_REDIST) | $(OPENNI2_REDIST64) |
| Samples | 範例程式 | ||
| Tools | 工具,目前只有 NiViewer | ||
VisualStudio 2010 專案設定
而如果是使用 Visual Studio 2010 來開發 OpenNI 2 的程式的話,基本上要在新建立的專案、或是現有專案裡,針對 including 和 linking 做設定,他的基本方法如下(附註 1):
-
在專案上方點滑鼠右鍵,點選跳出選單最底下的「Properties」(屬性),叫出專案設定的視窗。
(中文版畫面、英文版畫面) -
在左側導覽窗格中的「Configuration Properties」(組態屬性)下,可以找到「C/C 」,點開後選擇第一項的「Gerenal」(一般)後,右側的列表會有一個「Additional Include Directories」(其他 Include 目錄)。
要使用 OpenNI 2 的話,就需要在這裡面加入 OpenNI 2 的 header 檔所在的路徑,如果是 32 位元的專案,就是加上 $(OPENNI2_INCLUDE) ,如果是 64 位元的專案,則是加上 $(OPENNI2_INCLUDE64)。 (附註 2)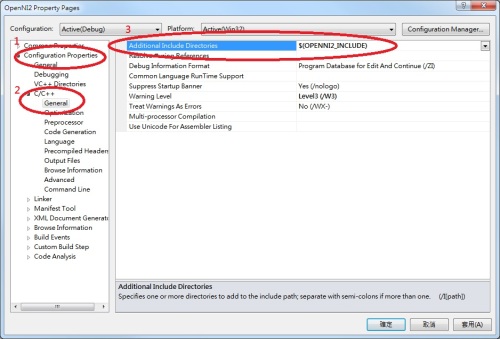
(中文版畫面) -
在左側導覽窗格中,剛剛的「C/C 」下方會有一個「Linker」(連結器),點開後,裡面第一個會是「Gerenal」(一般),點選之後,在右側可以找到「Additional Library Directories」(其他程式庫目錄)。
在這裡面加入 OpenNI 2 的 lib 檔、也就是 OpenNI2.lib 這個檔案的所在的路徑,如果是 32 位元的專案,就是加上 $(OPENNI2_LIB) ,如果是 64 位元的專案,則是加上 $(OPENNI2_LIB64)。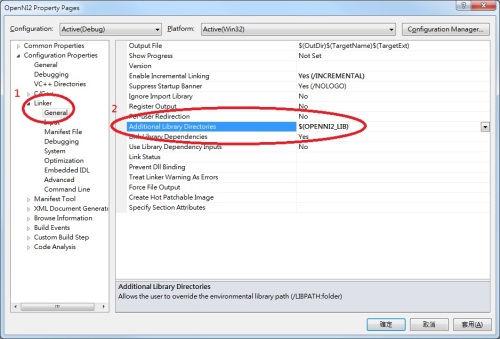
(中文版畫面) -
接下來,在左側的「Linker」(連結器)下,「General」(一般)的下面會有一個「Input」(輸入),點選後右邊可以找到「Additional Dependencies」(其他相依性);在這邊加入 OpenNI 2.0 的 lib 檔檔案名稱,也就是「OpenNI2.lib」。

(中文版畫面)



這樣,基本的專案設定就完成了。
要注意的是,在 Visual Studio 裡,不同的建置組態,例如 debug、release、Win32、x64,這些設定都是不同的~所以如果變更建置組態後,這些設定也是需要另外設定的。
 另外,在執行時要注意的是,OpenNI 2 的運作模式和 OpenNI 1.x 不一樣,所以它是設計成讓每個應用程式,可以個別擁有各自的 runtime library(dll 檔)等檔案,所以要執行的時候,就必須要讓程式找的到 OpenNI 2 安裝資料夾中,Redist 目錄下的檔案,否則程式執行時,就會出現找不到 OpenNI2.dll 的錯誤(如右圖)。這點,其實算是比較接近一般 C 函式庫的使用方法的。
另外,在執行時要注意的是,OpenNI 2 的運作模式和 OpenNI 1.x 不一樣,所以它是設計成讓每個應用程式,可以個別擁有各自的 runtime library(dll 檔)等檔案,所以要執行的時候,就必須要讓程式找的到 OpenNI 2 安裝資料夾中,Redist 目錄下的檔案,否則程式執行時,就會出現找不到 OpenNI2.dll 的錯誤(如右圖)。這點,其實算是比較接近一般 C 函式庫的使用方法的。
在 Windows 下,基本上應用程式在執行的時候,會優先去找程式執行的目錄下、是否有所需要的 dll 檔;所以最簡單的方法,就是把 Redist 目錄下所有的檔案,都複製一份到程式執行檔所在目錄就可以了。
不過如果是在 Visual Srudio 裡面進行開發的話,由於 VisualStduio 是可以設定執行時的工作目錄的,而工作目錄並不一定會是執行檔所在的路徑(預設不是),所以直接把 Redist 目錄下的檔案複製到執行檔所在路徑,在進行偵錯的時候並不一定有用。
而要確定 Visual Studio 的工作路徑在哪,可以透過點選專案、按右鍵後選擇右鍵選單的「Properties」(屬性),然後在左側選擇「Configuration Properties」(組態屬性)底下的「Debugging」(偵錯);這之後右邊會有「Working Directory」(工作目錄),他的值就代表了在透過 VisualStudio 針對這個專案進行偵錯時,他的工作目錄(英文版螢幕截圖、中文版螢幕截圖)。而如果是 Visual Studio 的預設值的話,他的值應該是「$(ProjectDir)」,也就是專案所在目錄(vcxproj 檔所在的地方)。
這時候可以採取的方法主要有幾種:
- 將 OpenNI2 Redist 目錄下所有的檔案,都複製到專案所在目錄。
- 修改 VisualStudio 偵錯階段的工作路徑,例如修改成 $(OPENNI2_REDIST)。
- 將 $(OPENNI2_REDIST) 加入到系統路徑(參考)。
哪種方法好?基本上是看狀況,見仁見智的。由於很多時候,程式還會用到其他函式庫,也有可能會需要用到他們各自的 dll 檔,所以把這些 dll 檔統一放在一起,其實也是一種解決方案。
基礎流程
在專案設定好後,要使用 OpenNI 2 來讀取感應器的資料的話,他的基本流程,大致如下:
-
include OpenNI.h 這個檔案。之後,OpenNI C API 的東西,都會在 openni 這個 namespace 下。
-
呼叫 openni::OpenNI::initialize() 這個函式來完成 OpenNI 2 環境的初始化。
-
宣告一個 openni::Device 的物件,並透過他所提供的 open() 這個函式,來完成裝置初始化。
-
如果有多個裝置,想要指定要用哪個裝置的話,需要先透過 openni::OpenNI::enumerateDevices() 這個函式,來取得可使用的裝置列表,再透過指定 URI 的方式,來指定要開啟哪個裝置。
-
如果沒有要特別指定的話,則是以 openni::ANY_DEVICE 當作 URI,讓系統自動決定要使用哪個裝置。
-
-
建立 openni::VideoStream 的物件,透過他的 create() 這個函式,指定這個 video stream 要使用哪個裝置的哪種感應器(紅外線、彩色影像、深度影像)。
建立完成後,則是可以透過 start() 和 stop(),來控制資料的讀取。 -
進入主迴圈,如果要讀取 video stream 當下的資料的話,則是呼叫 VideoStream 所提供的 readFrame() 這個函式,來把資料寫到 openni::VideoFrameRef 裡;而之後則是再透過 VideoFrameRef 所提供的函式,來做資料處理。
-
當不再需要使用感應器的資料的時候,要記得關閉所建立出來的資校。
-
呼叫 openni::VideoStream 的 destory() 這個函式,關閉 video stream。
-
呼叫 openni::Device 的 clode(),關閉裝置。
-
-
最後,則是呼叫 openni::OpenNI::shutdown(),來關閉整個 OpenNI 的環境。
簡單的範例
上面是用文字來做描述,實際上寫成程式碼,就會類似 OpenNI 官方所提供的「SimpleRead」這個範例一樣(預設位置在 C:\Program Files\OpenNI2\Samples\SimpleRead)。而下面,Heresy 則是在把程式碼做進一步的簡化(主要是刪掉錯誤偵測的部分),變成:
// STL Header
#include <iostream>
// 1. include OpenNI Header
#include "OpenNI.h"
int main( int argc, char** argv )
{
// 2. initialize OpenNI
openni::OpenNI::initialize();
// 3. open a device
openni::Device devAnyDevice;
devAnyDevice.open( openni::ANY_DEVICE );
// 4. create depth stream
openni::VideoStream streamDepth;
streamDepth.create( devAnyDevice, openni::SENSOR_DEPTH );
streamDepth.start();
// 5 main loop, continue read
openni::VideoFrameRef frameDepth;
for( int i = 0; i < 100; i )
{
// 5.1 get frame
streamDepth.readFrame( &frameDepth );
// 5.2 get data array
const openni::DepthPixel* pDepth = (const openni::DepthPixel*)frameDepth.getData();
// 5.3 output the depth value of center point
int idx = ( frameDepth.getWidth() * ( frameDepth.getHeight() 1 ) ) / 2;
std::cout << pDepth[idx] << std::endl;
}
// 6. close
streamDepth.destroy();
devAnyDevice.close();
// 7. shutdown
openni::OpenNI::shutdown();
return 0;
}
程式碼的內容,大致上就如同上一個段落所說明的,所以基本上這邊就只針對部分地方做補充的說明。
首先是第四部份,建立 VideoStream 的部分。這邊基本上是透過 VideoStream 物件(devAnyDevice)本身的 create() 函式,來指定這個 video stream 要使用哪個裝置的哪種感應器;在這個例子裡,所使用的是 openni::SENSOR_DEPTH,也就是深度感應器的部分。而在目前的 OpenNI 2 裡,除了 SENSOR_DEPTH 外,還有對應到彩色影像的 SENSOR_COLOR,以及對應到紅外線影像的 SENSOR_IR 可以使用。
而在資料讀取、也就是「5」的部分,在透過 VideoStream 的 readFrame() 這個函式,把這個時間點的影像資料,寫到 VideoFrameRef 後,要讀取深度資料,就是要透過 VideoFrameRef 的物件(frameDepth)來做存取了~在一般狀況下,主要是透過他的 getWidth() 和 getHeight() 這兩個函式,來取得這個影像的大小。而透過 getData(),則可以取得這個影像的資料;他所回傳的型別,是無型別的指標、void*,實際上是指到一個儲存影像資料的陣列的指標。
由於 OpenNI 2 把影像資料的讀取統一化了,同時也把 OpenNI 1.x 的 MapMetaData 的概念拿掉了,所以在資料的讀取上,會變得比較「低階」一點。首先,如果要做資料的讀取,需要自己根據影像的類型,來做轉型的動作。像在這邊由於是使用深度感應器,影像中每一個像素的資料型別都是 openni::DepthPixel;所以在這邊,就是需要把 void* 強制轉型成為 DepthPixel 的指標來使用(上方範例 5.2 的部分)(附註 3)。
經過這樣的處理,pDpeth 就是一個指到這張深度影像資料的一維振烈的指標,而這個陣列的大小,就是他的寬(透過 getWidth() 取得)乘上高(透過 getHieght() 取得);如果是 640 x 480 的話,pDpeth 所指到的陣列,大小就是 640 x480 = 307,200 了~而其中每一項,都代表一個點的深度;如果是要取得 ( x, y ) 這個點的值的話,就是要做一個簡單的座標換算,去取得他在陣列中的 index。這個基本的換算公式,就是:
int idx = x y * width;
只要把 x 和 y 帶入上面的公式,就可以簡單地算出每一個點在陣列中的位置,並取出他的值了。
而如果是要使用彩色影像的話,他預設的型別是 openni::RGB888Pixel 這個 structure,裡面是以三個 unsigned char 的變數,分別儲存著 RGB 三種顏色的值;而如果是紅外線影像的話,型別則是 openni::Grayscale16Pixel,實際型別則是和 DepthPixel 一樣,是 unsigned short。
小結
這篇算是 OpenNI 2 的第一篇教學文章,就先寫到這了~這邊的範例,基本上應該就算是一個算是最簡單,透過 OpenNI 2 來做深度資料讀取的範例了;其中有很大的篇幅,其實是在講如何設定專案就是了。
而這個範例程式在執行後,會讀取深度感應器的 100 個畫面,並把影像中樣的深度值做輸出,所以在執行後,會看到畫面上有一堆數字出現;由於這部分的程式並沒有繪圖的部分,所以執行後只會看到一串數字,是不會有影像出現的。
實際上,這個範例程式比較好的寫法,應該還是要像官方的「SimpleRead」這個範例一樣,加上錯誤偵測會更好,不過這邊為了篇幅,還是先把它拿掉了。而另外,這邊基本上是只針對單一個 video stream 做操作的寫法,如果是要同時讀取的彩色影像和深度影像的話,則可能還要再做一點的修改。
接下來…就期待下一篇文章吧~
附註
-
這邊的英文版是 Visual Studio 2010 的畫面、文字,中文版則是 Visual Studio 2012 的畫面與文字;不同的版本、不同的設定,選項可能會不盡相同,請自行根據狀況調整。
-
如果有多個項目的話,可以用「;」做區隔。
-
在 OpenNI 2 裡面,透過 Kinect 或 Xtion 取得的深度影像的每一個像素、DepthPixel 的單位,預設應該還是一樣是「mm」(公釐、毫米);不過實際上,他也有定義了幾種不同的 PixelFormat,代表其實是有可能可以娶到其他單位的深度的~所以其實要比較保險一點的話,還是得檢查 VideoMode 裡的 PixelFormat,才能確定 DepthPixel 代表的意義。
錯誤修改:
1. VideoFrameRef 的 getData() 回傳的是 const,所以轉型也是要是 const
2. 中心點的 index 計算有錯誤
希望能给一个openni2的安装说明,针对windows kinect的,直接使用windows的驱动就好吗?,并且,我在打开simple运行时,(vs2010)有很多提示的错误,我添加了相关文件了,希望能帮忙出一个这个的配置过程。谢谢
to wobuaishangdiao
在上一篇文章已經有給簡單的安裝說明了。
請參考: http://viml.nchc.org.tw/blog/paper_info.php?CLASS_ID=1&SUB_ID=1&PAPER_ID=424
而如果有錯誤無法執行的話,也請麻煩提供錯誤訊息,光說有錯誤基本上是沒辦法判斷問題在哪的。
error LNK2019: 无法解析的外部符号 __imp__oniStreamStart,该符号在函数 “public: enum openni::Status __thiscall openni::VideoStream::start(void)” (?start@VideoStream@openni@@QAE?AW4Status@2@XZ) 中被引用
这种错误,很多
我就是安装了windows sdk 然后安装了,openni2, 和nite2 ,然后运行openni2的例子,就出现了这种错误,灰常多,
kheresy.wordpress.com
这个是你的网站吗,上面有很多实例,但是我的服务器打不开你的网站,给我一个其他的登录方式吗?
或者你的这些文件有没有word备份啊,给我发一份吧,非常感谢,我的邮箱wobuaishangdiao@163.com
真心喜欢kinect,疯狂学习中!!
to wobuaishangdiao
「error LNK2019: 无法解析的外部符号」這種 linking 的錯誤,基本上一般是因為找不到指定的 lib 檔,或是沒有指定必要的 lib 檔所造成的。
請確定你在專案設定的「Additional Dependencies」裡,有正確地加上 openni2.lib 這個 OpenNI 2.0 的 lib 檔。
而 http://kheresy.wordpress.com 算是 Heresy 的個人部落格(這邊是團隊的),在大陸那邊因為你們的防火牆擋掉了,所以可能無法直接存取;這點可能就要請你自行翻牆了…
heresy 老师,欢迎在www.cnkinect.com 分享您的知识,谢谢。[url=http://www.cnkinect.com/]www.cnkinect.com[/url]
to heresy
老师,我按你说的我在一个新的工程中,将samples中simpleRead的代码,拷入后,配置了环境运行成功。
当我在自带的那个,simpleRead中直接打开时,我按成功的刚才的那个配置,运行总是还是出很多的错误,配置的
【這種 linking 的錯誤,基本上一般是因為找不到指定的 lib 檔,或是沒有指定必要的 lib 檔所造成的。
請確定你在專案設定的「Additional Dependencies」裡,有正確地加上 openni2.lib 這個 OpenNI 2.0 的 lib 檔。】
都是正确的。
错误如下:
—— 已启动生成: 项目: SimpleRead, 配置: Debug Win32 ——
1>生成启动时间为 2012/12/27 1:00:30。
1>InitializeBuildStatus:
1> 正在对“C:Program FilesOpenNI2SamplesSimpleRead..BinIntermediateWin32-DebugSimpleReadSimpleRead.unsuccessfulbuild”执行 Touch 任务。
1>ClCompile:
1> 所有输出均为最新。
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniFrameRelease,该符号在函数 “public: void __thiscall openni::VideoFrameRef::release(void)” (?release@VideoFrameRef@openni@@QAEXXZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniStreamStart,该符号在函数 “public: enum openni::Status __thiscall openni::VideoStream::start(void)” (?start@VideoStream@openni@@QAE?AW4Status@2@XZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniStreamStop,该符号在函数 “public: void __thiscall openni::VideoStream::stop(void)” (?stop@VideoStream@openni@@QAEXXZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniStreamReadFrame,该符号在函数 “public: enum openni::Status __thiscall openni::VideoStream::readFrame(class openni::VideoFrameRef *)” (?readFrame@VideoStream@openni@@QAE?AW4Status@2@PAVVideoFrameRef@2@@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceGetSensorInfo,该符号在函数 “public: class openni::SensorInfo const * __thiscall openni::Device::getSensorInfo(enum openni::SensorType)” (?getSensorInfo@Device@openni@@QAEPBVSensorInfo@2@W4SensorType@2@@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniInitialize,该符号在函数 “public: static enum openni::Status __cdecl openni::OpenNI::initialize(void)” (?initialize@OpenNI@openni@@SA?AW4Status@2@XZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniShutdown,该符号在函数 “public: static void __cdecl openni::OpenNI::shutdown(void)” (?shutdown@OpenNI@openni@@SAXXZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniGetExtendedError,该符号在函数 “public: static char const * __cdecl openni::OpenNI::getExtendedError(void)” (?getExtendedError@OpenNI@openni@@SAPBDXZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceCreateStream,该符号在函数 “public: enum openni::Status __thiscall openni::VideoStream::create(class openni::Device const &,enum openni::SensorType)” (?create@VideoStream@openni@@QAE?AW4Status@2@ABVDevice@2@W4SensorType@2@@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniStreamIsPropertySupported,该符号在函数 “public: bool __thiscall openni::VideoStream::isPropertySupported(int)const ” (?isPropertySupported@VideoStream@openni@@QBE_NH@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniStreamGetSensorInfo,该符号在函数 “private: void __thiscall openni::VideoStream::_setHandle(struct _OniStream *)” (?_setHandle@VideoStream@openni@@AAEXPAU_OniStream@@@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniStreamDestroy,该符号在函数 “public: void __thiscall openni::VideoStream::destroy(void)” (?destroy@VideoStream@openni@@QAEXXZ) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceOpen,该符号在函数 “public: enum openni::Status __thiscall openni::Device::open(char const *)” (?open@Device@openni@@QAE?AW4Status@2@PBD@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceIsPropertySupported,该符号在函数 “public: bool __thiscall openni::Device::isPropertySupported(int)const ” (?isPropertySupported@Device@openni@@QBE_NH@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceIsCommandSupported,该符号在函数 “public: bool __thiscall openni::Device::isCommandSupported(int)const ” (?isCommandSupported@Device@openni@@QBE_NH@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceGetInfo,该符号在函数 “private: enum openni::Status __thiscall openni::Device::_setHandle(struct _OniDevice *)” (?_setHandle@Device@openni@@AAE?AW4Status@2@PAU_OniDevice@@@Z) 中被引用
1>main.obj : error LNK2019: 无法解析的外部符号 __imp__oniDeviceClose,该符号在函数 “public: void __thiscall openni::Device::close(void)” (?close@Device@openni@@QAEXXZ) 中被引用
1>C:Program FilesOpenNI2SamplesSimpleRead..BinSimpleRead.exe : fatal error LNK1120: 17 个无法解析的外部命令
1>
1>生成失败。
1>
1>已用时间 00:00:00.14
========== 生成: 成功 0 个,失败 1 个,最新 0 个,跳过 0 个 ==========
to wobuaishangdiao
再確認一下,你是 64 位元的電腦嗎?
你安裝的 OpenNI 是 32 位元還是 64 位元的?
因為你這邊進行建置的,是 32 位元 debug 的組態,所以需要使用 32 位元的 OpenNI,專案內的 Additional Library Directories 也需要設定成為 $(OPENNI2_LIB)
谢谢heresy ,
恩,明白了,
你给了我有一个激情,努力学习,
挺你!!!
heresy老师
我的电脑是64位的,装的OpenNI2也是64位的,也遇到了wobuaishangdiao一样的问题,在Additional Library Directories进行设置页没有解决,请问还有什么可能的解决方法?
to ehtan
請確認你在 VC 裡面所建置的專案是否有選擇 x64
heresy老师,您好,我的openni2历程都可以运行,但是我设置了环境,试了你上面的代码,build成功,但是运行时出现Unhandled exception at 0x520c8f2b (OpenNI2.dll) in NI.exe: 0xC0000005: Access violation reading location 0x00000000.这个是什么情况呢:(
@youyou
這個問題應該會是在初始化的時候有地方出錯的關係。
建議請加上錯誤處理的程式,看看是哪邊有問題。
http://viml.nchc.org.tw/blog/paper_info.php?CLASS_ID=1&SUB_ID=1&PAPER_ID=426
to heresy
我按照上面步骤新建了一个程序,编译成功,但运行时出现了以下错误:
“未经处理的异常: System.AccessViolationException: 尝试读取或写入受保护的内存。这通常指示其他内存已坏。
在 kinect_device.KinectStreamImpl.mainLoop(KinectStreamImpl* ) 位置 c:users
tool.labworkspace
ightlywrapper\builderopenni2sourcedriverskinectkinectst
reamimpl.cpp:行号 137
在 kinect_device.KinectStreamImpl.threadFunc(Void* pThreadParam) 位置 c:user
s ool.labworkspace
ightlywrapper\builderopenni2sourcedriverskinectkinect
streamimpl.cpp:行号 317”
请问是显卡驱动的问题吗?
@ Jack
這個錯誤訊息是 Kinect 模組產生的,和顯示卡驅動程式應該沒關係。
建議先確認一下你的 Kinect for Windows SDK 版本,並確認 Kinect for Windows SDK 所提供的範例可以正確執行。
to heresy
SDK是1.5的,SDK的范例都可以运行,但运行OpenNI2的范例出现同样的问题。
@ Jack
抱歉,這樣的話,Heresy 也不確定問題是什麼了。
to heresy
谢谢你了
为什么读出的数据都是0,出现error:
Cannot find or open the PDB file.
to Tierney
「Cannot find or open the PDB file.」的錯誤是因為有部分 dll 沒有提供 PDB 來做偵錯,這點基本上不影響執行。
而數據都是 0,可能是因為你的感應器前方有遮蔽物、離目標物太近,或是該點剛好是偵測不到深度的地方。建議你調整感應器的位置在試試看。
heresy你好,请问一下读出的深度图象资料阵列大小是默认的吗?640 x 480? 深度感应器应该有一个视角范围的吧?知道了某点的距离,怎么知道它的角度呢?
to Grit
1. 影像的解析度預設值會因為不同的裝置有所不同。
2. 不確定你的問題是什麼?不過 OpenNI 可以取得攝影機的 FoV 資訊。
to heresy
1.如果装置不变,不管是近处还是远处的物体,深度图象阵列大小都不会变吗?
2.我是想问一个物体偏离摄影机正前方的角度可以通过这个深度感应器的数据得到吗?(当我知道前方不远处有障碍的时候,我需要左转还是右转一定的角度)
非常感谢。
to Grit
1. 這邊的解析度當然是指感應器本身的解析度,也就是整個捕捉到的畫面的解析度;物體離得越遠、所占像素就會越小。
2. 這個要自己計算,基本上是算得出來的。
to heresy
也就是我离墙50厘米和离墙500厘米时的得到的深度图象阵列大小都不会变是吗?(同一装置)
to Grit
這邊的深度感應器基本上和一般的攝影機是差不多的。
離牆越近、看到的範圍越窄,物體所佔的像素會越多;離牆越遠、看到的範圍越大,物體所佔的像素會越少。
但是感應器本身得到的資料解析度不會因為距離而有所改變。
說實話,不太理解為什麼會這樣問?
to heresy
请问老师为什么我每次在运行程序时VS2012会把程序中断在VideoStream::create函数的Status rc=(Status)oniDeviceCreateStream这一句?也就是文章里基础流程的第四步有问题。OpenNI2的配置我也是按文中的步骤进行的。望指导
to herry
建議請參考:
http://viml.nchc.org.tw/blog/paper_info.php?CLASS_ID=1&SUB_ID=1&PAPER_ID=426
這樣才可以知道他到底為什麼失敗。
to heresy
看过了链接的这篇博文,我试着查找了一下原因,发现在打开NiViewer.exe之后提示找不到设备,可我的Kinnect for windows SDk2.0里的例程都可以正常运行,这是为什么,难道是版本问题?
to herry
您好。
OpenNI 並沒有原生支援 Kinect 2.0。
如果你是使用第二代 Kinect 感應器,建議請直接使用 Kinect for Windows SDK 進行開發。
to heresy
我明白了,十分感谢!