
 擴增實境(Augmented Reality,簡稱 AR、維基百科)這個技術,主要的概念就是把攝影機實際拍到的畫面,在顯示出來的同時,根據畫面的內容,加上其他的資訊、畫面,讓虛擬的物體,可以和真實的廠景融合在一起顯示。
擴增實境(Augmented Reality,簡稱 AR、維基百科)這個技術,主要的概念就是把攝影機實際拍到的畫面,在顯示出來的同時,根據畫面的內容,加上其他的資訊、畫面,讓虛擬的物體,可以和真實的廠景融合在一起顯示。
由於把虛擬和現實融合,算是一個相當有趣、而且也相當特別的應用,所以其實在這方面的應用、研究,也都算滿多的;再加上現在許多行動手持裝置,不但配備了小型化的攝影機,也都有足夠的計算能力了,所以在近年來,也算是越來越熱門。不過實際上,這種概念並不算非常地新,在 1994 年就已經有人提出來了~到目前為止,也算是發展好一段時間了。
而雖然 AR 的理想,是可以直接辨識畫面的內容,來做物體的辨識、定位,但是礙於實際上的計算效率、準確性,現階段比較普遍的應用,應該都還是需要特殊哪片、也就是需要「mark」來做辨識、定位的 AR。像右圖,就是一套算是相當成熟的 AR 開放原始碼函式庫、ARToolkit(官網、維基百科)的示意圖;裡面的人所拿著的,就是專門的 AR 卡片,上面就是即時辨識出這張卡片,並把虛擬人物放進去的效果。
不過,雖然說 ARToolKit 是一個相當成熟的函式庫,但是由於他已經沒有在繼續維護了(News 最後是 2007 年底、提供的 Windows 環境也是到 Visual Studio .Net 2003 而已),所以以現在的觀點來看,在使用上算是有相當地限制…像是他雖然是以 OpenGL 來做 3D 繪圖的函式庫,但是如果要和新的 Shader-based OpenGL 來做整合,似乎也有不少問題。所以當 Heresy 這邊要做 AR 相關的應用的時候,馬上就覺得他並不適和 Heresy 這邊的需求。
而 Heresy 後來使用的,則是使用以 OpenCV(官網)這套電腦視覺函式庫所提供的功能為基礎的方法;實作上,主要則是參考 OpenCV-AR(首頁)這個 SourceForge 上的開放原始碼專案,來修改而實作完成的。
在這個函式庫的實作裡面,他主要概念,是去偵測畫面中的四邊形、然後把抓到的四邊形影像,轉換成為正方形的圖片,根據指定的樣板進行辨識;如果辨識的相似度夠高,則就視為是要處理的 marker,根據四邊形的四個點來計算出所應對應的矩陣,讓顯示的程式可以透過這個矩陣,來把 3D 的物體畫在對應的位置上。
而由於他是基於四邊形偵測來做處理的,而且辨識的過程又是把影像轉換成正方形,所以它基本上能接受的 marker,就變成一定是要是有明確的四邊形外框的正方形影像了~下面兩張圖,就是這個函式庫所給的兩個範例的 marker:
 
上面兩張圖,基本上是 OpenCV AR 能接受的兩種不同形式的 marker。
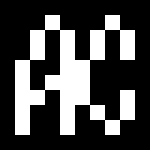
左邊的圖基本上是一種比較簡單的形式。他基本上是放大過的圖,原圖大小應該要是 10×10 個像素,每個像素都只有黑或白兩種可能;而由於實際上為了確保外圍的邊還是四邊形,所以外面是不能有白色的;也就是資訊都會記錄在裡面的 8×8、共有 64 個像素的矩形裡。(大小可以透過修改程式來調整)
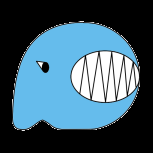
右邊的則是一個黑底、再加上一般圖片,基本上只要確定黑底在外圍可以構成完整的四邊形、同時影像是方形的,就可以了~而雖然他是給彩色的圖片,不過為了減少環境光造成的影響、同時也減低計算量,所以實際上在內部處理的時候,都是轉換成灰階來做計算的。圖片的大小在程式中並沒有做額外的限制,但是由於圖片越大計算量會越多,所以建議不要用太大的圖檔當作 marker。
前者基本上比較單純,在程式裡面會轉換成編碼過的資料,直接進行比對;基本上不但效率比較好、準確性也比較高;但是相對的,可以變化的幅度就比較小了。
下方是在進行每一個畫面處理時,比較完整的流程圖:
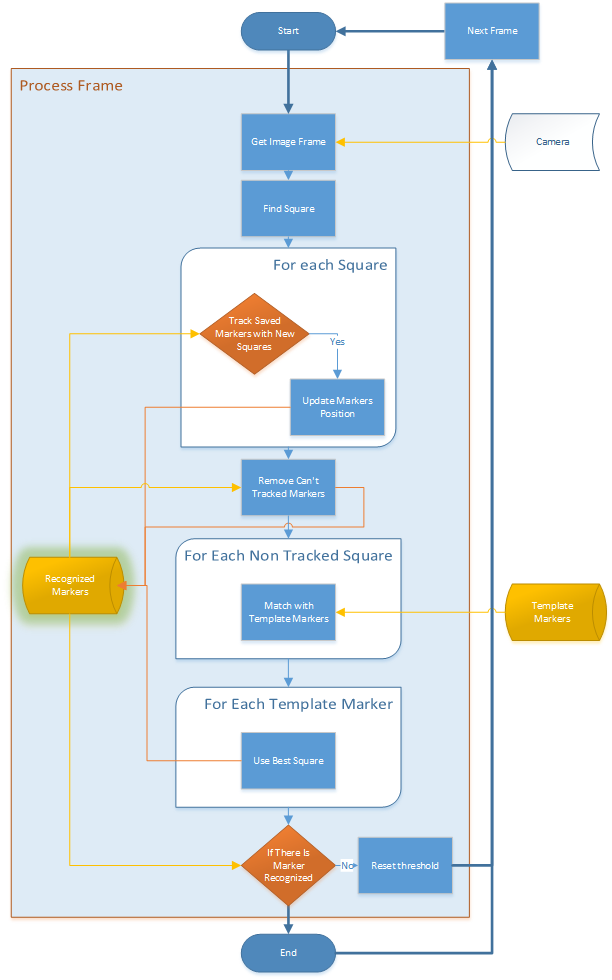
首先,右邊的「Template Markers」是在初始化階段,讀取進來的 marker 的資料,是用來做比對用的樣板(以下稱為 template marker)。而左邊的「Recognized Markers」則是用來記錄成功辨識到的 marker、以及其相對的位置資訊;這個資料在完成後並不會被清除,而是留給外部做存取、以及給下一個畫面做追蹤用的。
在開始後,他會從攝影機取得當下的畫面,做一些處理後,就開始在畫面中偵測四邊形、也就是上圖中「Find Square」的區塊。而在找到畫面中的四邊形後,針對每一個找到的四邊形,會去和之前找到的 marker(Recognized Markers)做比對,如果夠接近的話,就當作是同一個 Marker,然後直接更新它的位置;這基本上算是用追蹤位置的方法,來簡化整個流程的計算量。
而在做完這個動作後,則是會把其他沒有更新過的 Marker 從記錄中刪除,讓 Recognized Markers 裡面只保存在這個畫面,已經追蹤到的 marker。
接下來,則是針對剩下來、沒辦法用 track 來解決的四邊形、則是會把它轉換成正方形的影像後,針對 template markers 裡的所有樣板資料,一筆一筆去做比對,藉此來找出這個四邊形最像的 template marker;這也是整個流程裡面,計算量最大的地方。
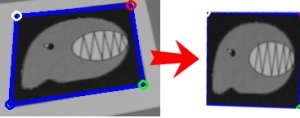 右方就是這邊的示意圖,左邊的藍色框框,就是找到的四邊形,而強制把他轉換成正方形的影像後,就會像右邊的圖一樣;之後就是透過這個轉換後的影像,來進行比對的。而針對不同類型的 marker,其實也有不同的比對方法,這個就等之後講到這部分再來說了~
右方就是這邊的示意圖,左邊的藍色框框,就是找到的四邊形,而強制把他轉換成正方形的影像後,就會像右邊的圖一樣;之後就是透過這個轉換後的影像,來進行比對的。而針對不同類型的 marker,其實也有不同的比對方法,這個就等之後講到這部分再來說了~
而這樣找出來的結果,可能會有不同的四邊形,都對應到同一個 template marker;而為了避免這樣的問題,這裡則會再去針對每一個 template marker、都去做一次比較,來找出相似度最高的四變形,並以此為最終的結果,存入 Recognized Markers 中。
如果找完後,完全沒有找到四邊形的話,他會去修改進行 binary threshold 時的 threshold 值(他是用亂數產生),來試著讓程式可以在下一個畫面,找到更多四邊形進行測試。
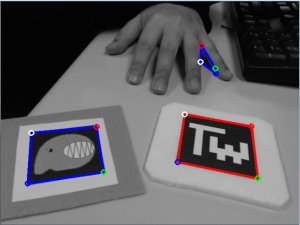
最後,下面就是最後結果的示意圖。左邊是用來偵錯的畫面,裡面的藍色和紅色框框,就是有偵測到的四邊形;由於只是在偵測四邊形,所以可以看到,裡面的手指間,也被認為是一個四邊形了~=而其中藍色是代表有偵測到,但是沒有找到對應的 template marker,而紅色則是有找到對應的,所以可以看到在右邊的結果畫面裡,「Tw」這個 Maker 已經被一個台灣的 3D 物件取代了~
 
這篇基本上是概念和架構性的文章,大概就先到這邊了。之後有時間,再來寫實作的內容介紹吧~
博主你好,一直在关注你的博客,请问为什么我看不到你文章当中的图呢?
to shimingD
應該是因為中國大陸把 WordPress.com 擋掉的關係吧…